ETH-Forscher lassen autonomen Bagger Trockensteinmauer bauen
ETH-Forscher haben im «Circularity Park» in Oberglatt ZH mit einem autonomen Bagger eine sechs Meter hohe und 65 Meter lange Trockensteinmauer in zirkulärer Bauweise errichtet. Mit dem Park sollen nachhaltige, robotergestützte Bautechniken demonstriert werden.

Quelle: Gramazio Kohler Research, ETH Zurich, Eberhard AG. Photo: Marc Schneider
Luftaufnahme: Der «Circularity Park» soll mehrere Beispiele für nachhaltige, robotergestützte Baupraktiken zeigen.

Quelle: Gramazio Kohler Research, ETH Zurich, Eberhard AG. Photo: Marc Schneider
Luftaufnahme: Der «Circularity Park» soll mehrere Beispiele für nachhaltige, robotergestützte Baupraktiken zeigen.

Quelle: Gramazio Kohler Research, ETH Zurich, Eberhard AG. Photo: Marc Schneider
Luftaufnahme: Der «Circularity Park» soll mehrere Beispiele für nachhaltige, robotergestützte Baupraktiken zeigen.
Der «Circularity Park» ist eine durch Roboter
gefertigte Terrassenlandschaft, die 2021 während rund einem Jahr konzipiert und
auf dem Campus der Eberhard AG in Oberglatt gestaltet wurde. Der Park sei das
Ergebnis zentraler Forschung in den Bereichen autonomes Bauen, Robotik und
Architektur an der ETH Zürich, heisst es in einer Mitteilung der Projektbeteiligten
von Mittwoch.
Park demonstriert robotergestützte Bautechniken
Der Park dient als
Demonstrationsobjekt für nachhaltige, robotergestützte Bautechniken. Für das
Projekt haben ETH-Forscher von Gramazio Kohler Research, dem Robotic Systems
Lab und dem Lehrstuhl für Landschaftsarchitektur mit einem autonomen Bagger
eine Trockensteinmauer gebaut. Dabei kam auch
eine zirkuläre Bauweise zur Anwendung, die mit der Eberhard AG entwickelt wurde.
Das Bauunternehmen unterstützt das Projekt gemäss Mitteilung mit Materialien und «Konstruktionsinnovationen». Für die Forscher dient der Park als Praxisbeispiel, bei dem das Design, die Steuerung und die Berechnungstools untersucht werden, um autonome Roboter-Bauprozesse direkt auf der Baustelle mit vorhandenen Materialien und lokaler Erde zu ermöglichen.

Quelle: Gramazio Kohler Research, ETH Zurich, Eberhard AG. Photo: Marc Schneider
Der Menzi Muck scannt jeden Felsbrocken, um ihn an der richtigen Position zu platzieren.

Quelle: Gramazio Kohler Research, ETH Zurich, Eberhard AG. Photo: Marc Schneider
Der Menzi Muck scannt jeden Felsbrocken, um ihn an der richtigen Position zu platzieren.
Recycelter Beton und lokale Steine
Für den Bau der Trockensteinmauer wurden gemäss Mitteilung rezyklierter Beton und Steine aus der Region verwendet. Darüber hinaus wurden verschiedene ökologische Materialien in den Bau integriert: Der Drainagekies in der Aufschüttung wurde aus Eisenbahnschotter recycelt. Die Treppen an beiden Enden sind aus wiederverwendeten Steinfassadenplatten und einem Betonkörper einer anderen Umgebung zusammengesetzt.
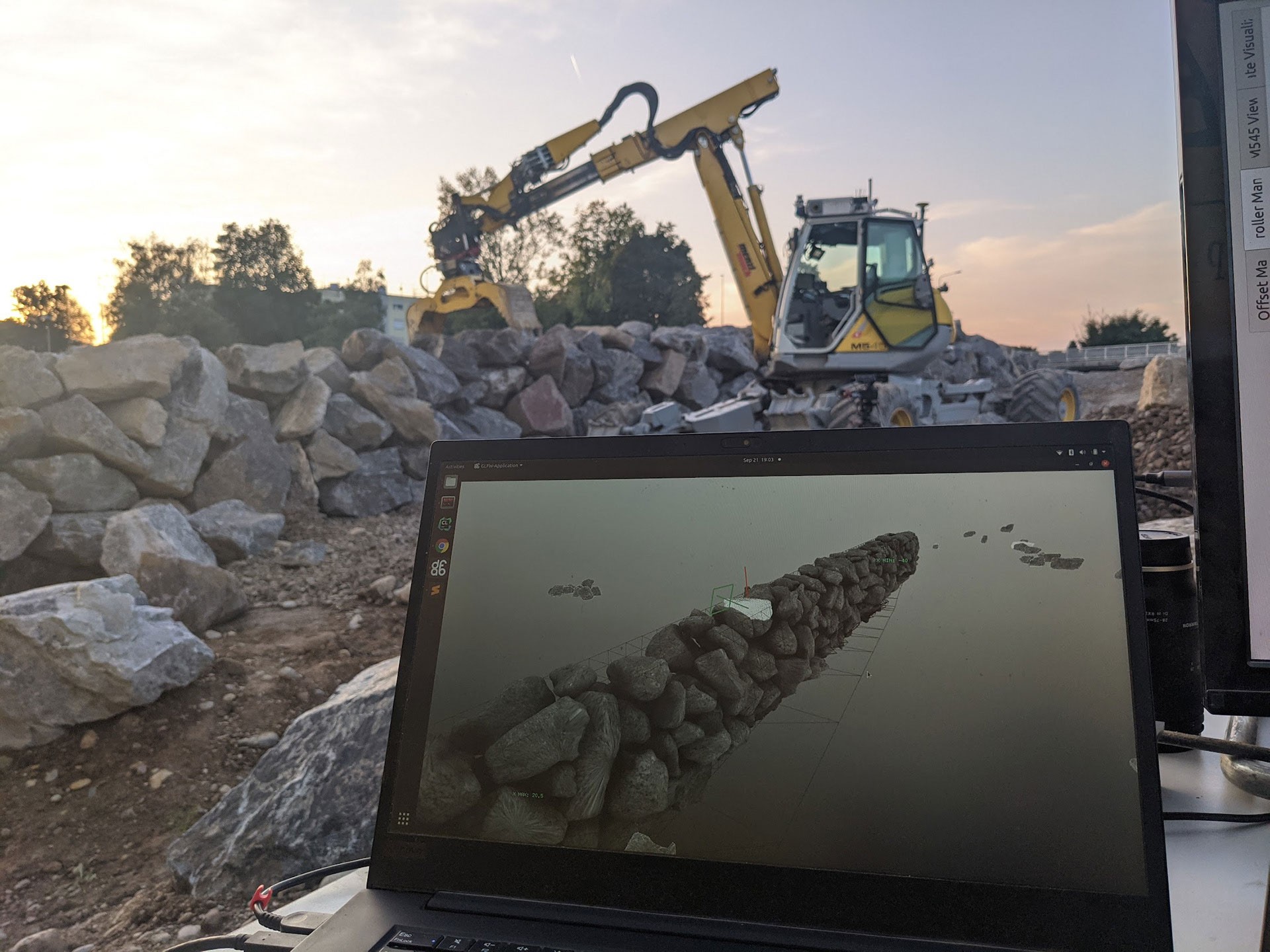
Ziel der Forschung hinter der Steinmauer ist «die autonome Konstruktion von Mauerwerken in architektonischem Massstab unter Verwendung vorgefundener und leicht verfügbarer Materialien wie Betonabfällen und Steinen», heisst es im Communiqué. Realisiert wurde die Mauer mit dem Roboterbagger «Heap» (Hydraulic Excavator for an Autonomous Purpose) – einem spezifischen «Menzi Muck M545 12t»-Schreitbagger, der vom Robotic Systems Lab entwickelt wurde.
Quelle: Gramazio Kohler Research, ETH Zurich, Eberhard AG. Photo: Ryan Luke Johns
Computergestützte Planung und Steinplatzierung mit dem autonomen Bagger «HEAP».
Ein ausführliches Video erklärt den Bauprozess im Detail (Englisch). (Quelle: Gramazio Kohler Research & Robotic Systems Lab, ETH Zurich, Eberhard AG. Video: Girts Apskalns)
Autonomer Bagger erstellt Steinmauer
Mithilfe von computergestützter Planung stapelte «Heap» Stein für Stein aufeinander und schuf am Ende eine 65 Meter lange und maximal sechs Meter hohe Mauer, die aus 938 Einzelelementen besteht. Mit einer durchschnittlichen Masse der Felsbrocken und des Betonabbruchmaterials von über 1000 Kilogramm gehöre die Mauer zu den grössten robotergefertigten Bauwerken überhaupt, heisst es in der Mitteilung.
Die vom «Heap»-Roboterbagger erstellte Stützmauer ist Teil einer Terrassenlandschaft. Das dazugehörige Forschungsprojekt «Robotic Lanscapes» zielt darauf ab, computergestützte Werkzeuge, Technologien und Arbeitsabläufe für die automatisierte und digital gesteuerte Landschaftsgestaltung zu entwickeln. Dabei soll gemäss Mitteilung eine Präzision für komplexe Formen erreicht werden, die mit manuellen Ausgrabungsmethoden nicht möglich wäre.
Die Roboterlandschaft im Park diene dazu, den Fussgängerverkehr zu erleichtern, indem sie die grossen Höhenunterschiede zwischen der Ober- und Unterseite der Stützmauer verbindet. Dazu hat das Robotersystem mit hoher Genauigkeit vier grosse Böschungen angelegt. Jede Böschung ist dabei in kleinere Stufen unterteilt, was das lokale Pflanzenwachstum unterstützen und gleichzeitig den Wasserabfluss sowie die Erosion kontrollieren soll.

Quelle: Gramazio Kohler Research, ETH Zurich, Eberhard AG. Photo: Marc Schneider
Für den Bau der Trockenmauer wurden recycelter Beton und Steine aus der Region verwendet. Zudem wurden verschiedene ökologische Materialien in den Bau des Demonstrationsobjekts integriert. Der Drainagekies in der Aufschüttung wurde so etwa aus Eisenbahnschotter recycelt.
Ökologischer Fussabdruck reduzieren
Der «Circularity Park» zeige, dass sich Berechnungsmethoden, Ansätze der maschinellen Bildverarbeitung und neue Kontrollmethoden erfolgreich integrieren lassen, um die geometrische Vielfalt von Stein- und Schuttformen in einem adaptiven Bauprozess zu handhaben, der sich in einer unstrukturierten Bauumgebung entfaltet, schreiben die Projektbeteiligten.
Da die Bauindustrie einen wesentlichen Beitrag zu den weltweiten Treibhausgasemissionen leiste, sei von entscheidender Bedeutung, neue Technologien für nachhaltige Baupraktiken zu nutzen. Ein solcher Weg sei das Umgestalten der grauen Energie von Materialsystemen, die beim Bau verwendet werden. Im Bauen mit lokal beschafften Steinen und Betonabfällen sehen die Forscher das Potenzial, den ökologischen Fussabdruck des Bauens für bestimmte Anwendungen zu reduzieren.
Der Landschaftspark in Oberglatt soll der Öffentlichkeit mehrere Beispiele für solche nachhaltigen Baupraktiken zeigen. Die derzeit noch laufenden Forschungsprojekte zur Roboter-Steinmauer und -Landschaft erfolgen im Rahmen des Nationalen Forschungsschwerpunkts Digitale Fabrikation (NCCR DFAB) an der ETH Zürich. (mgt/pb)

Quelle: Gramazio Kohler Research, ETH Zurich, Eberhard AG. Photo: Marc Schneider
Beim «Circularity Park» handelt es sich um eine Terrassenlandschaft mit einer durch Roboter gefertigten Stützmauer, die 2021 während rund einem Jahr konzipiert und gebaut wurde.
Projektbeteiligte
Gramazio Kohler Research, ETH Zurich
Prof. Matthias Kohler, Prof. Fabio Gramazio, Lauren Vasey (Projektleitung), Ryan
Luke Johns (Leitung Steinmauer)
Robotic Systems Lab, ETH Zurich
Prof. Marco Hutter, Martin Wermelinger, Dominic Jud, Varin Buff, Vuk Pakovic,
Mads Albers
Chair of Landscape Architecture, ETH Zurich
Prof. Christophe Girot, Ilmar Hurkxkens
(Leitung Robotik-Landschaft)
Vision for Robotic
Lab, ETH Zurich
Prof. Margarita Chli, Ruben Mascaro
Kunde: Eberhard Unternehmungen AG
Ausgewählte Experten: Patric Van der Haegen, Michael Maur, Roger Ruf (Eberhard
Unternehmungen AG); Jovica Zilic, Guido Morri, (Gysi Leoni Mader
AG); Elia Quadranti, Sandro Kühne (ATP architekten ingenieure), Remo Hug
(zirkulit AG), Prof. David Kammer, Dr. Mohit Pundir, Flavio Lorez (Chair of
Computational Mechanics of Building Materials), Vasileios Ntertimanis,
Konstantinos Vlachas (Chair of Structural Mechanics and Monitoring, ETH
Zurich), Mike Lyrenmann (Institute of Technology in Architecture, ETH Zurich).
Literaturhinweis
Die Forschungsarbeit zum «Circularity Park» wurde in der Wissenschaftlichen Zeitschrift «Science Robotics» veröffentlicht.
A framework for robotic excavation and dry stone construction using on-site materials, Johns RL, Wermelinger M, Mascaro R, Jud D, Hurkxkens I, Vasey L, Chli M, Gramazio F, Kohler M, Hutter M.