Wenn Roboter die Glasfassade reparieren
Zwei Semester lang haben Maschinentechnik-Studierende der Hochschule für Technik in Rapperswil (HSR) an speziellen Prototypen getüftelt. Sie entwickelten Roboter-Trägersysteme für Glas-Schleifmaschinen, die beschädigte Glasfassaden autonom reparieren können.

Quelle: Hochschule für Technik Rapperswil (HSR)
Ein HSR-Student bereitet seinen Roboter an der Testwand vor.
Quelle: Hochschule für Technik Rapperswil (HSR)
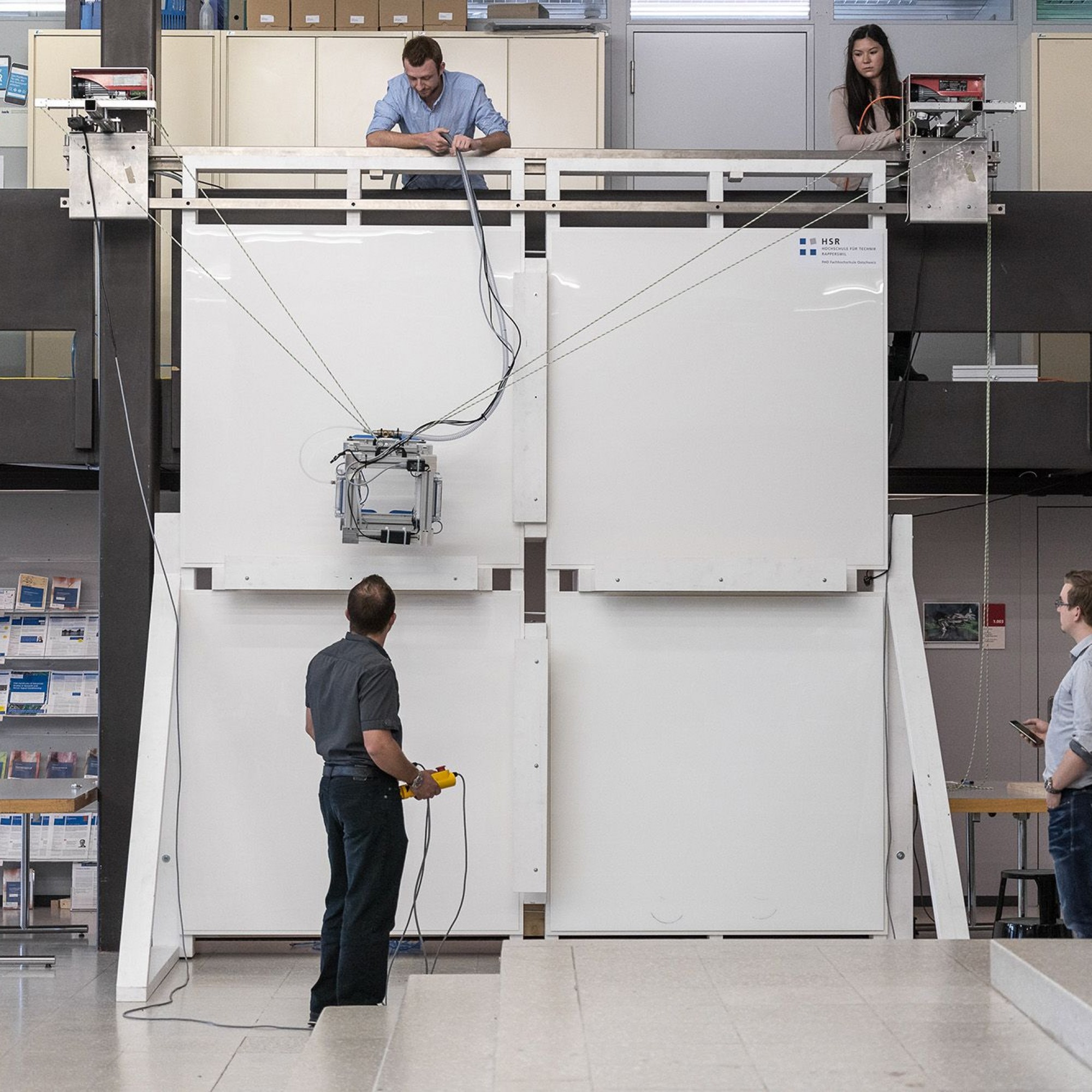
Der Roboter navigiert an der Demo-Fassade zum beschädigten Fenster.
Quelle: Hochschule für Technik Rapperswil (HSR)
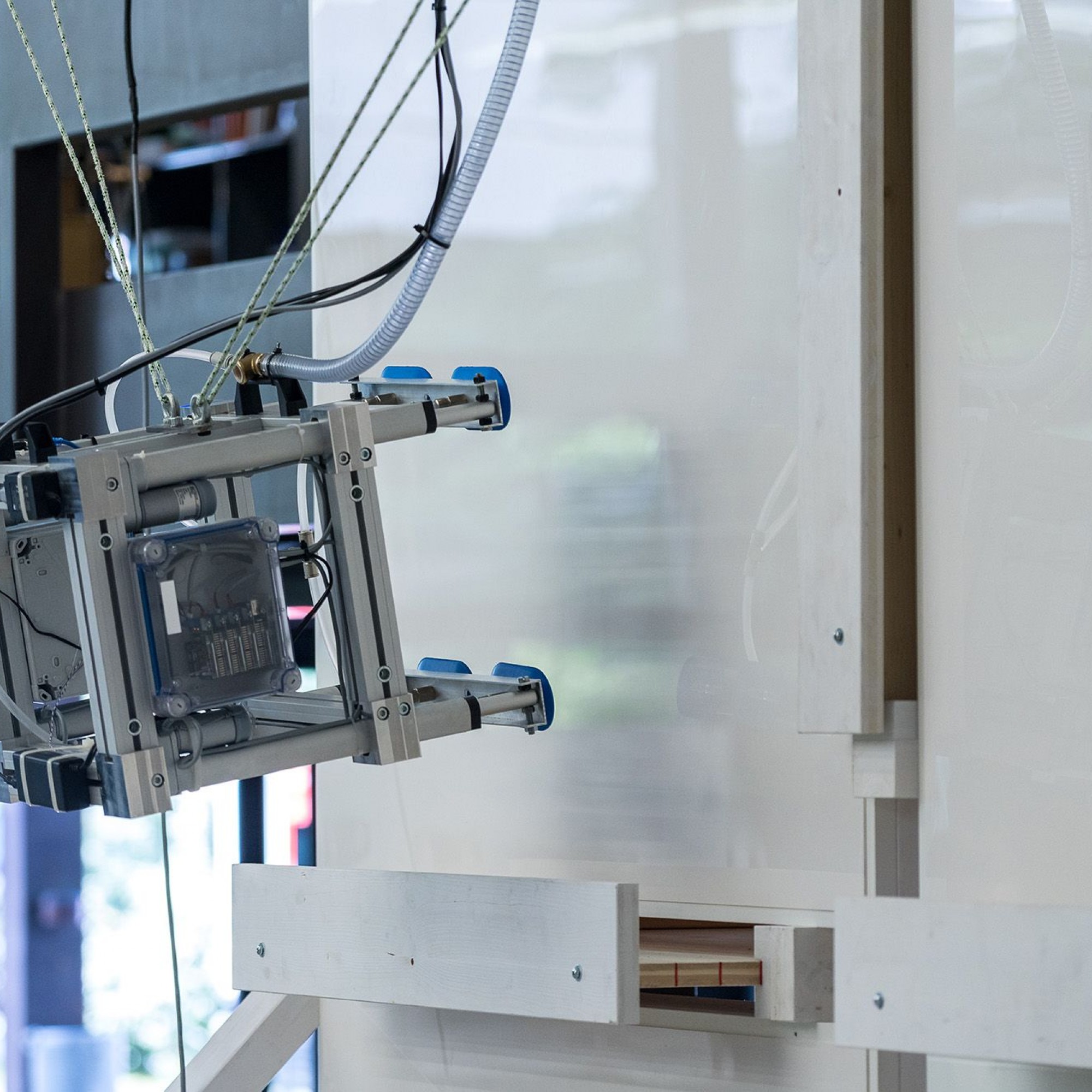
Ein anderer Roboter-Prototyp positioniert sich an der Demo-Fassade …
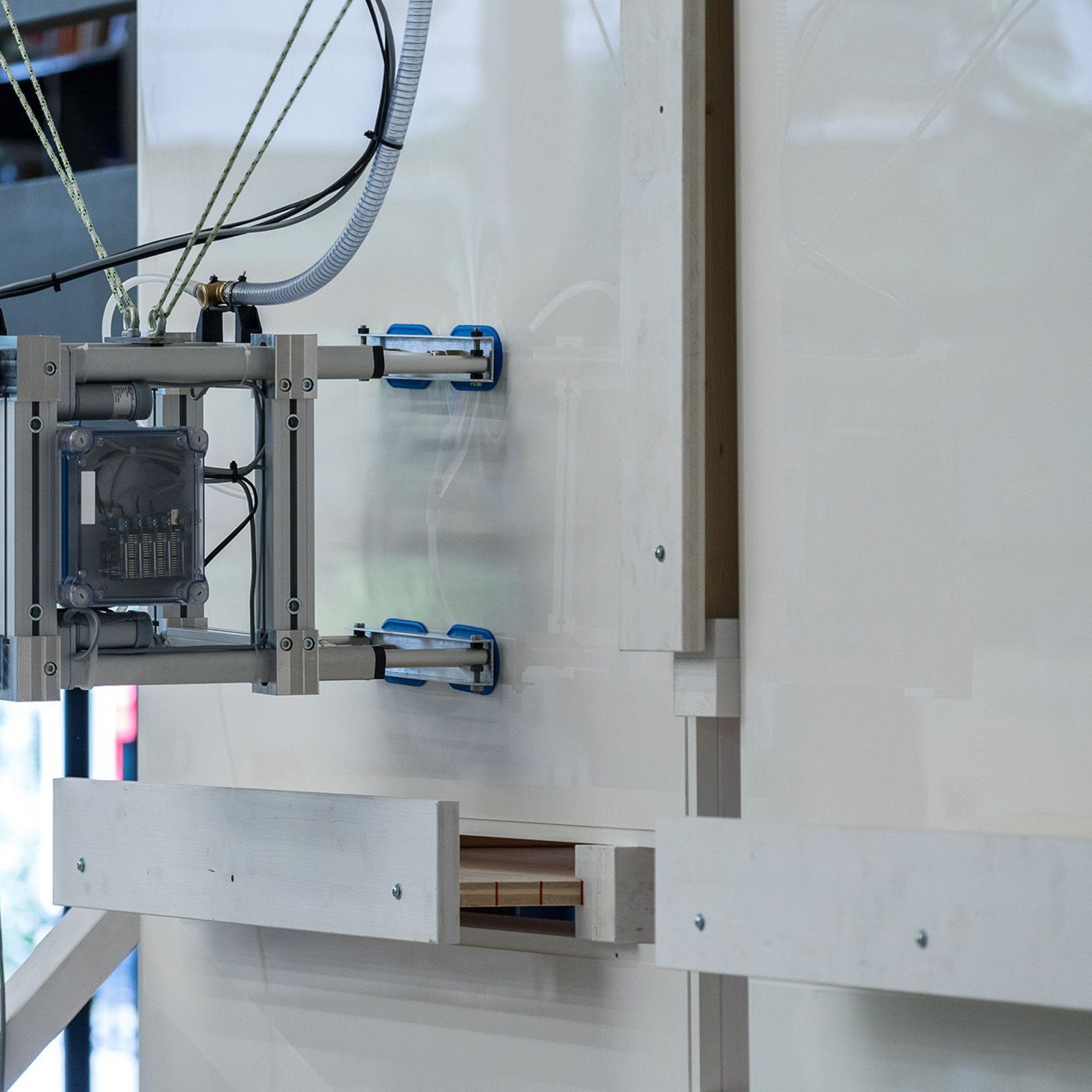
Quelle: Hochschule für Technik Rapperswil (HSR)
… und saugt sich dann fest.

Quelle: Hochschule für Technik Rapperswil (HSR)
Ein HSR-Student moderiert die Live-Demonstration des von ihm mitentwickelten Roboters.

Quelle: Hochschule für Technik Rapperswil (HSR)
Dieser löst bereits wieder die Saugnäpfe von der Demo-Fassade, um die nächste Beschädigung anzusteuern.

Quelle: Hochschule für Technik Rapperswil (HSR)
Dort saugt sich der Roboter wieder fest.

Quelle: Hochschule für Technik Rapperswil (HSR)
Das Publikum verfolgt interessiert die Team-Präsentationen und Live-Demonstrationen.
In Live-Demonstrationen an einer nachgebauten Glasfassade haben die Teams kürzlich fünf der Prototypen vor Publikum im Einsatz gezeigt. Zwei Semester lang entwickelten die angehenden Maschinentechnik-Ingenieure Roboter, welche die Aufgabe haben, Glas-Schleifmaschinen auf einer Glasfassade zu positionieren und für Reparaturarbeiten zu befestigen. «Für die zehn Prototypen leisteten unsere Studierenden über 10‘000 Arbeitsstunden», sagte Professor Hanspeter Gysin, der den HSR-Studiengang Maschinentechnik/Innovation leitet.
Die Herausforderung war es, die bis zu 25 Kilogramm schweren Schleif- und Poliermaschinen in grosser Höhe an den beschädigten Fenstern anzubringen und die Reparaturen sicher auszuführen. Bis anhin werden diese Arbeiten von spezifisch ausgebildeten Mitarbeitenden ausgeführt, die dafür die Seilwinden für die Reinigung von Hochhaus-Glasfassaden nutzen. Künftig will der HSR-Industriepartner Vetrox AG bei grossen Glasflächen Roboter losschicken.
Gute Basis für künftige Marktlösung
Die präsentierten Lösungen waren vielfältig. Einige der Studierenden-Teams liessen sich für ihre Prototypen von der Tierwelt allgemein inspirieren. So gab es einige Modelle mit Saugnäpfen und Beinen. Andere orientierten sich an konkreten Tieren. Die Spannerraupe zum Beispiel diente als Vorbild für eine längliche Konstruktion mit Saugnäpfen und beweglichen Gelenken. Wieder andere setzten auf konventionellere Konzepte mit Alurahmen und Seilaufhängungen. Auch eine Flugdrohne wurde vorgestellt. Fast alle Konzepte überzeugten in den Live-Präsentationen und konnten die simulierte Schleifmaschine erfolgreich an der Glasfassade anbringen und in den Arbeitsmodus versetzen.
«Bei unserem Auftrag ging es um mögliche Konzepte und testfähige Prototypen, nicht um sofort einsetzbare Roboter», sagte Vetrox-Geschäftsführer Bernhard Dür. Er plant, in rund zwei Jahren einsatzfähige Roboter-Systeme zu nutzen. «Unsere fertig entwickelte Lösung wird voraussichtlich mehrere Elemente der HSR-Prototypen enthalten», so Dür. Das Ziel des Entwicklungsprojektes im HSR-Studiengang Maschinentechnik/Innovation war denn auch, in Teams verschiedene Lösungskonzepte für die künftigen Schleifmaschinen-Trägersysteme zu erproben und damit die Grundlage für die Entwicklung einer marktfähigen Lösung zu liefern. (pd/gd)